ucsd-creative-robotics
Augmentation
For this project you will design an augmentation. This could be a wearable for a person, a prosthetic for an animal, or an augmentation to an object. Your augmentation will have 3 Degrees of Freedom (DOF). And it should demonstrate expressive movement, i.e. the way that it moves should create a feeling, communicate a state, establish a relationship with a viewer.
Design Considerations
- Ideation:
- What is the target for your augmentation? Is it a wearable for a person, a prosthetic for an animal, an augmentation of an object? (Discuss)
- How will it attach?
- What types of motion will it use? (servos, DC motors with wheels, etc.)
- What does the augmentation communicate? (for instance, Ian Ingram’s piece below communicates danger in squirrel tail language). Remember our theme of expressive movement—-what is the character of the movement?
- Design
- Fabrication
- Program
Proposal
- Add new pages to your digital sketchbook. Address the questions from the Design Considerations above.
- Add sketches, images, that communicate your creative plans.
Prototype
- Bring a functional prototype with 2 degrees of freedom to class on Week 5.
- Add pages to your digital sketchbook that document this functional prototype.
Final Submission
- Sketchbook Updates:
- add sketches; circuit designs; photographs of parts/components; process images/videos; photos of final product; any notes, narrative about process.
- Submission:
- Photographs of the final project
- Video of the project in motion
- Dev board source code as a zip file.
- 3d models of anything you printed.
- Upload all of these files to Canvas
- (use the naming convention lastname_p1.jpg lastname_p1.3dm, lastname_p1.zip for source code)
DUE to Canvas check deadline there.
References
Examples of Augmentations:

Behnaz Farahi Iridescence (2019)
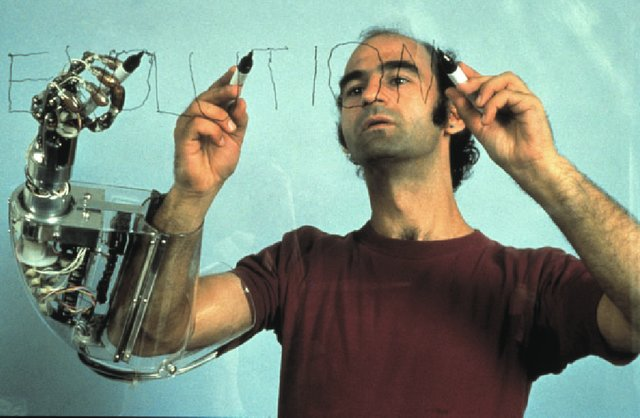
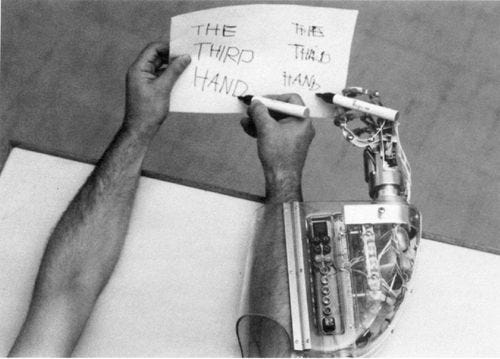
Stelarc 3rd Hand (1980)

Ian Ingram, Danger, Squirrel Nutkin! (2009)
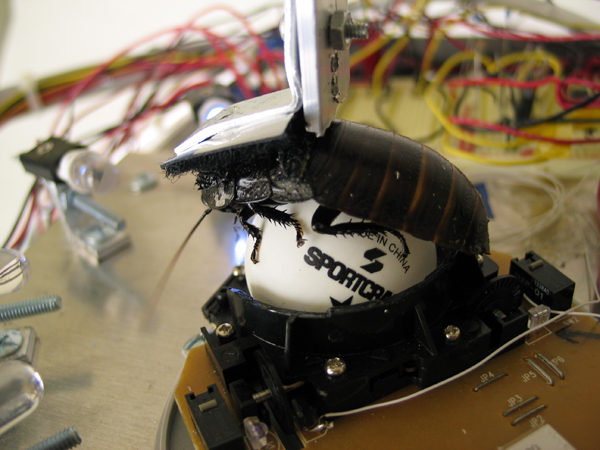
Garnet Hertz Cockroach Controlled Mobile Robot #1 (90s-2000s)

Amy Youngs Rearming the Spineless Apuntia (1999)